User’s Manual¶
NOTICE: THIS CODE IS NOT BEING MAINTAINED AND MAY THEREFORE NOT WORK CORRECTLY ANYMORE OR THE INFORMATION MAY BE OUTDATED
Setup Ubuntu side¶
Assuming Gazebo is already installed as described in the Installation and Getting Started sections, the .launch file needs to be run.
- Source/ export all paths and files as initially described in the Getting Started section.
- Run the launch file which starts ROS, Gazebo with the PaBi legs and a PaBiDanceSimulator ROS node
**NOTICE: THIS COMMAND IS NO LONGER WORKING AS HTHE FILES WHERE RENAMED. CHOOSE THE APPROPRIATE .LAUNCH FILE **
roslaunch roboy_simulation pabi_world.launch
This should be the result:
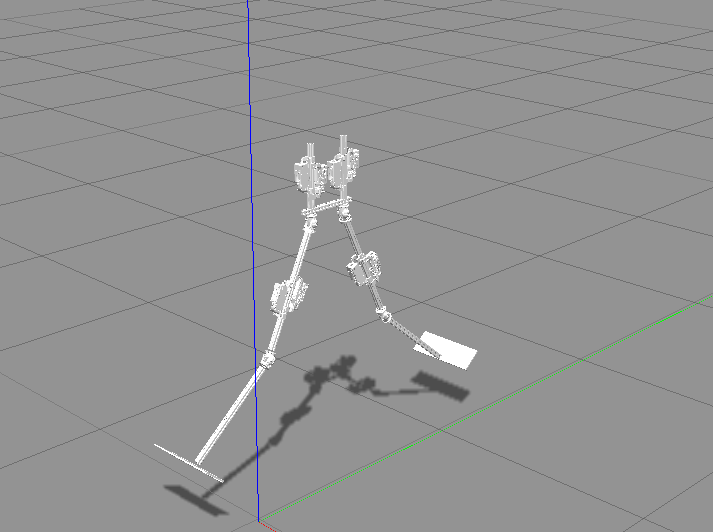
PaBi model in Gazebo
Setup Unity side¶
Unity should be set up according to the Installation and Getting Started instructions. Therefore, only start Unity and open the PaBiViveScene. There should be a ROSBridge object in the hierarchy. Select this object and enter the IP Adress of the machine on which the simulation is running. PaBi now shows the dance moves, interaction with the leg model is possible via a GUI and different tools.
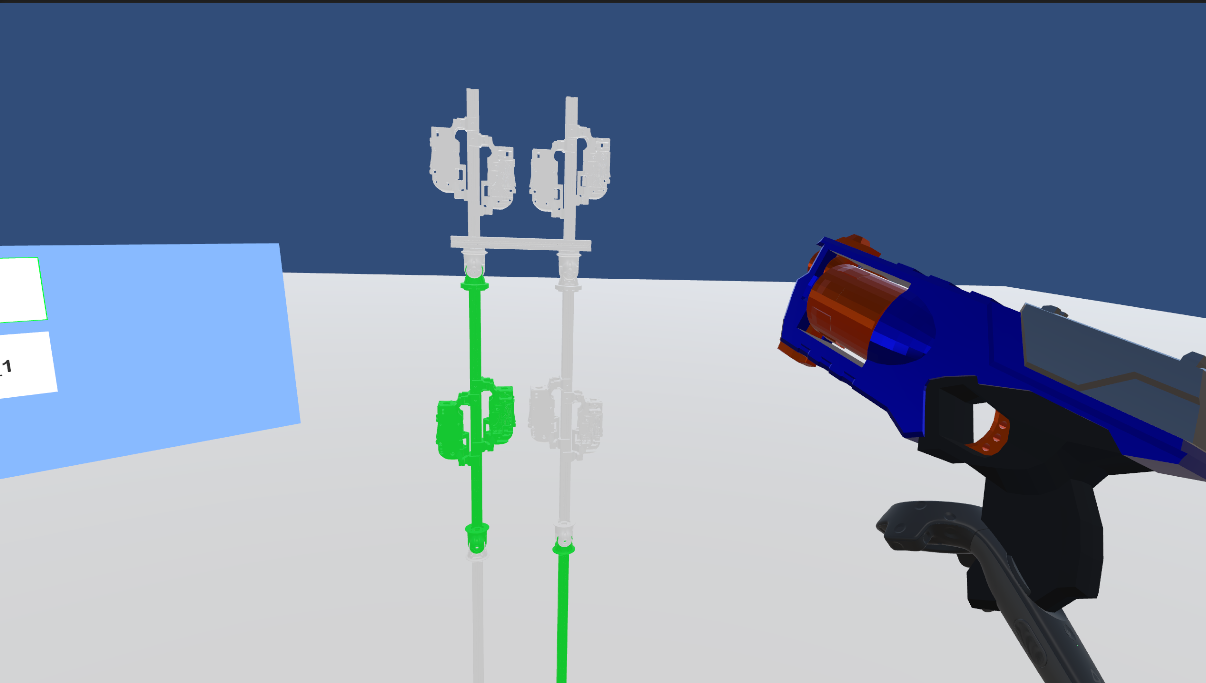
Note: Shooting PaBi with the nerf gun does not have any consequences