Context¶
The core of RoboyVR renders and updates roboy’s pose as its receiving data from the simulation via ROS-messages. Additional information inside messages like current powerconsumption or motorforce is displayed on an interactive GUI. Apart from that the user can actively manipulate the simulation through various tools. On top of that the system can check for the latest roboymodel with the help of github and update it if necessary.
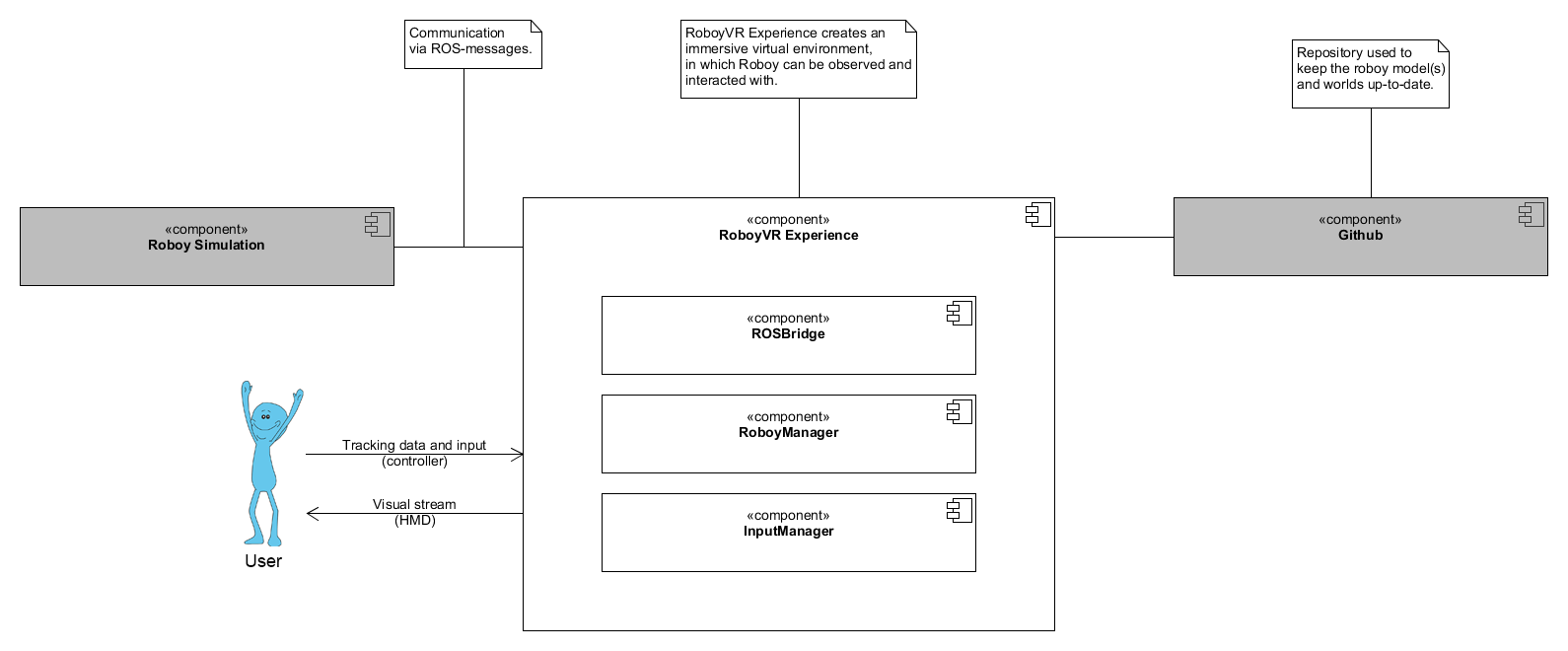
RoboyVR Experience has two neighboring systems. Roboy simulation to receive pose data and Github for model updates.