Solution Strategy¶
RoboyVR consists of different components which work together. One big part deals with the transition between the different coordinate frames of Gazebo and Unity. At first the rotations were represented via Euler Angles, this lead to gimbal locks. To avoid this we switched to quaternions. Roboy’s pose needs to be converted to Unity’s coordinate frame. In addition we convert the model of roboy to a unity friendly format. The other part deals with user interaction. RoboyVR uses user input to manipulate the simulation and renders the result on a GUI.
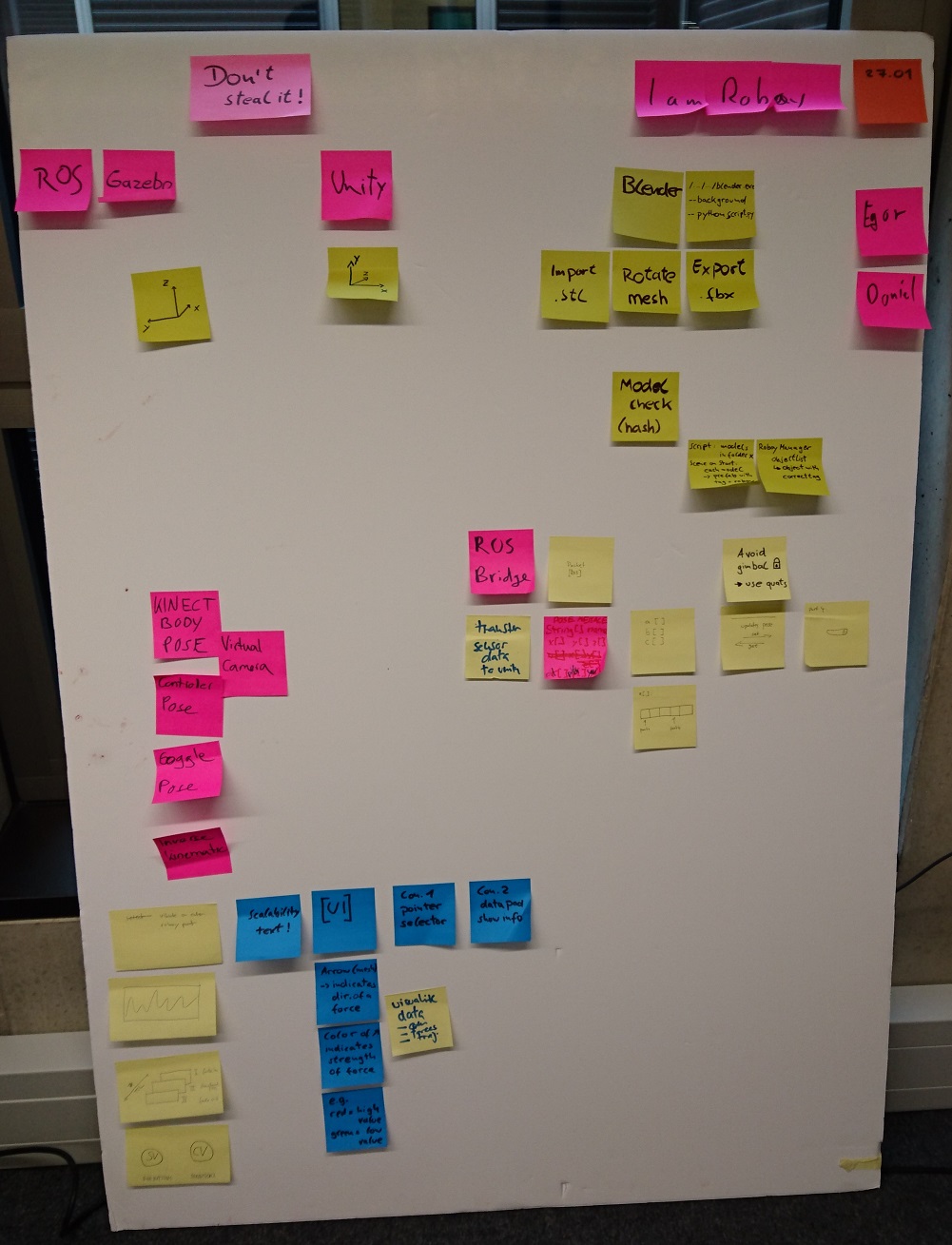
Whiteboard showing problems and solutions that occured during development of roboyVR.
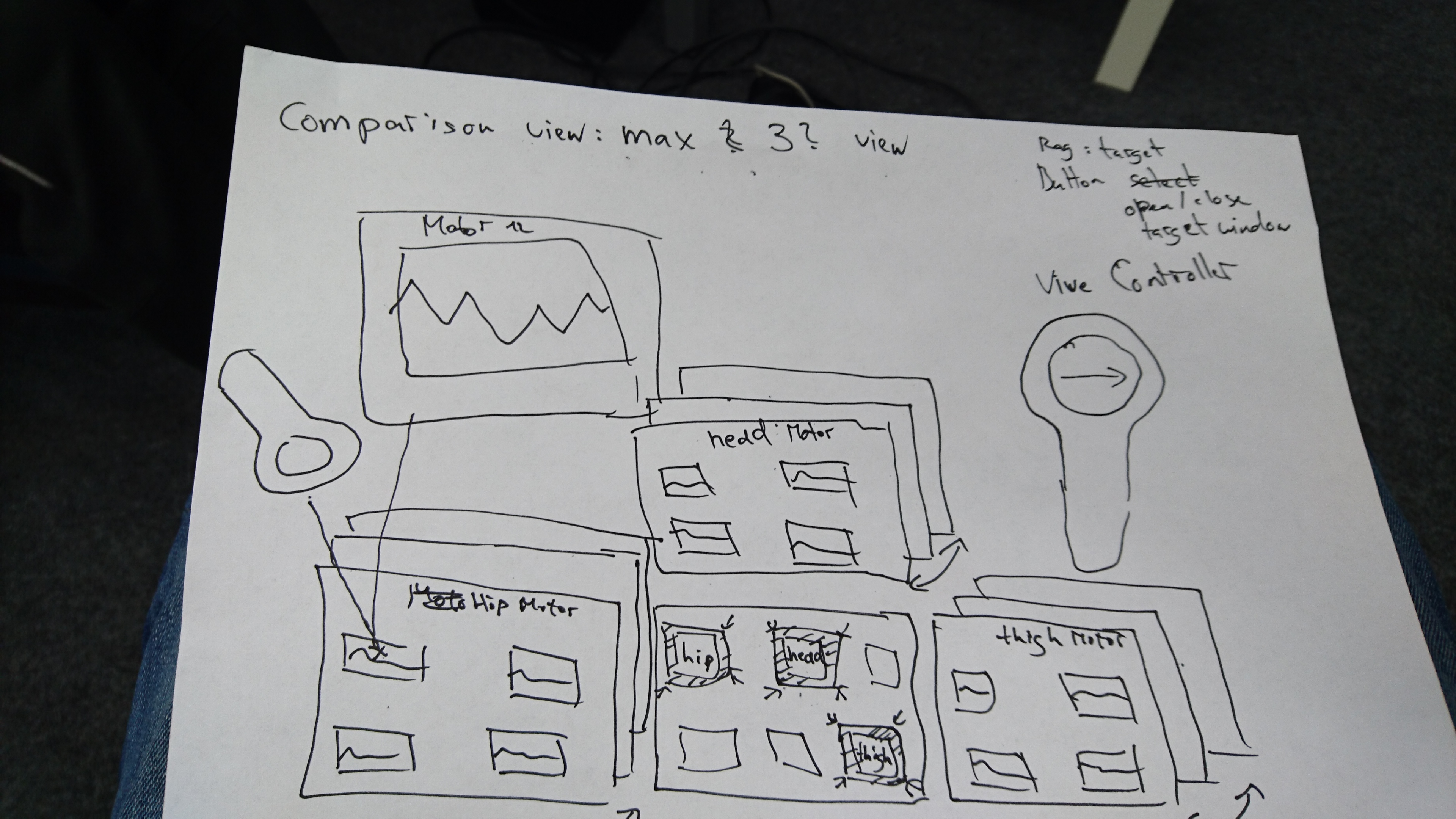
Handdrawn sketch showcasing the design of a specific UI Panelmode (comparison).
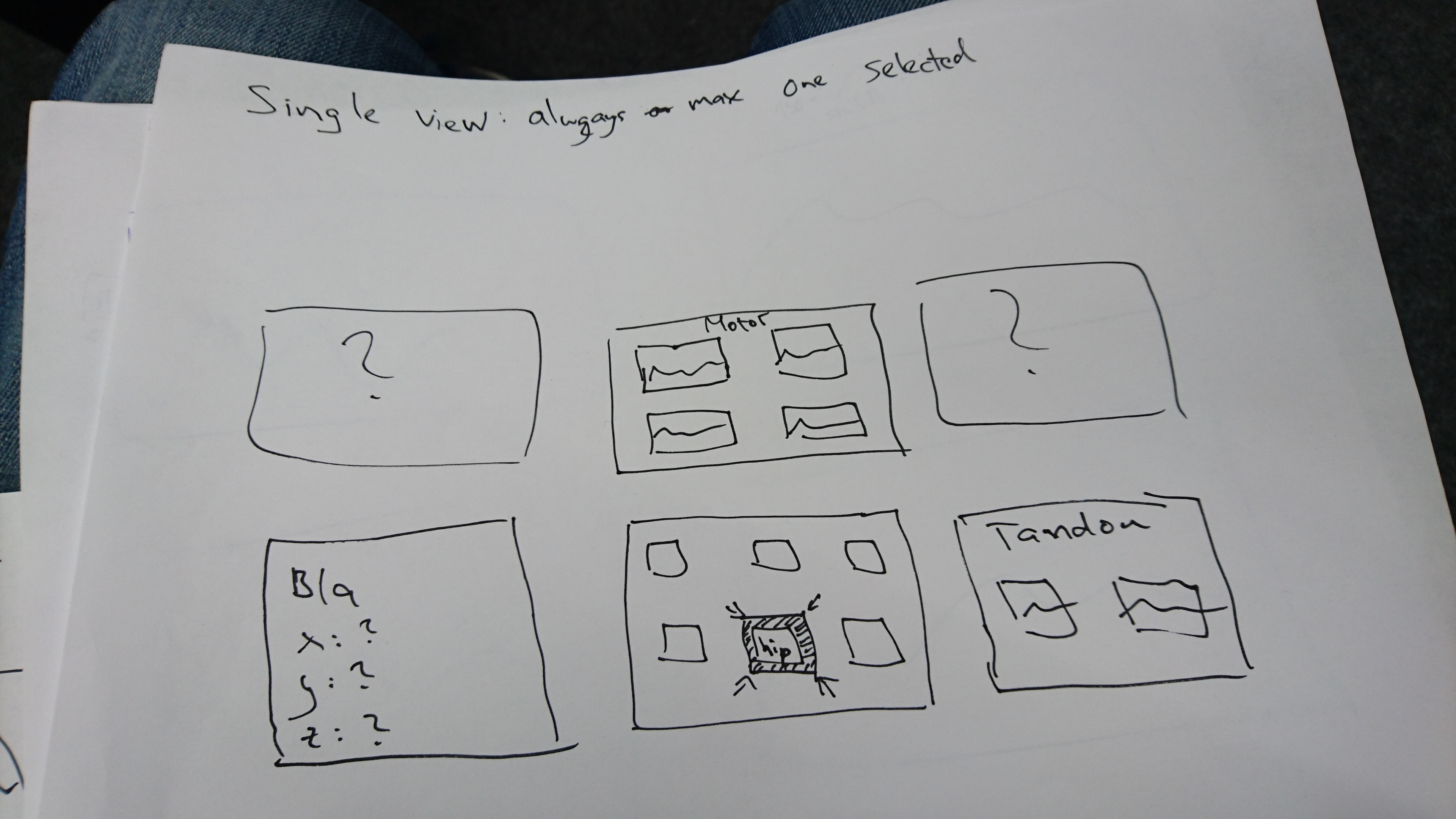
Handdrawn sketch showcasing the design of a specific UI Panelmode (single).